
От рефлекса к метарегулятору: Бернштейн, Спиридонов, Попов и hippocampal ripples в науке действия, ориентированного на будущее
Аннотация
Статья предлагает концептуальную модель человеческого действия, в которой поведение рассматривается не как простая реакция на стимул и не как механическое извлечение прошлого опыта, а как результат предварительного построения, проигрывания и отбора будущих траекторий. Теоретической основой выступает линия Н. А. Бернштейна, связанная с переходом от рефлекса к модели будущего. Прикладной физической опорой рассматриваются системы Спиридонова и Попова, в которых действие понимается как управление собой, другим человеком, пространством и самой деятельностью через устойчивость, центр тяжести, ритм, внимание, инерцию и структуру ситуации. Современная нейронаучная опора задаётся исследованиями hippocampal sharp-wave ripples, показывающими, что гиппокамп участвует не только в памяти, но и в планировании, replay и координации возможных последовательностей действия. На этой основе вводится понятие метарегулятора как многоуровневого механизма выбора, допуска, подавления и реализации траекторий. Статья утверждает, что подготовка человека к действию в неопределённости должна строиться не только вокруг памяти, реакции и навыка, но вокруг способности строить внутреннюю карту будущего действия и управлять ею.
Ключевые слова: метарегулятор, Бернштейн, модель будущего, hippocampal ripples, Спиридонов, Попов, навигационная психология, траектория действия, устойчивость, когнитивная наука.
Введение: почему рефлекс больше не объясняет действие
Классическая схема поведения долгое время строилась вокруг простой формулы: стимул вызывает реакцию. Такая модель удобна для описания элементарных ответов организма, но она становится недостаточной, когда речь идёт о сложном человеческом действии: научном открытии, следственной работе, боевой подготовке, управлении кризисом, спортивном поединке, экспедиционной деятельности, педагогике или стратегическом решении.
Человек не просто отвечает на внешний раздражитель. Он действует в поле неопределённости, где событие ещё не завершилось, но уже требует выбора. Он должен удерживать цель, оценивать риск, предвидеть развитие ситуации, управлять собственным состоянием, учитывать действия другого человека, использовать пространство, перестраивать план и сохранять возможность выхода.
Именно поэтому рефлекторная схема оказывается слишком бедной. Она описывает прошлое: что воздействовало на организм и какой ответ был вызван. Но человеческое действие в значительной степени организовано будущим: тем результатом, который ещё не наступил, но уже задаёт структуру настоящего поведения.
В этой статье предлагается рассмотреть действие как процесс, в котором субъект не просто реагирует, а предварительно строит и проигрывает возможные траектории будущего. Такой подход позволяет соединить три линии: физиологию активности Н. А. Бернштейна, прикладные физические модели действия Спиридонова и Попова, а также современные исследования hippocampal ripples в когнитивной нейронауке.
Главный тезис статьи:
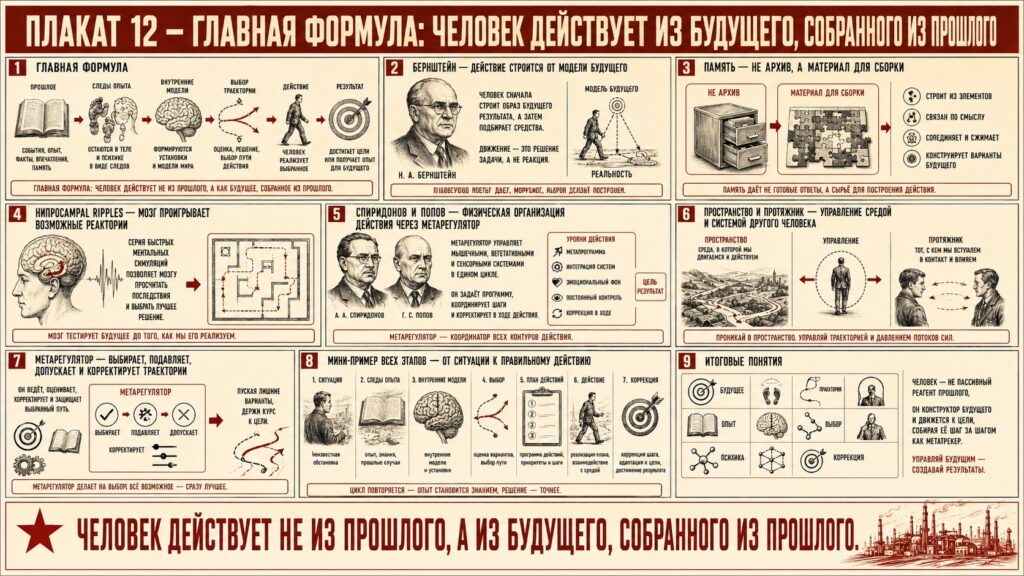
Человек действует не из прошлого, а из будущего, собранного из прошлого.
Память в этом случае не является архивом. Она становится материалом для построения траекторий. Тело не является механизмом исполнения команды. Оно становится системой управления устойчивостью. Пространство не является фоном. Оно становится активным регулятором действия. Другой человек не является только внешним препятствием. Он становится системой, регулятор которой может быть нарушен, перегружен, смещён или перенаправлен.
Так возникает центральное понятие данной статьи — метарегулятор.
Метарегулятор — это не просто самоконтроль. Самоконтроль управляет поведением субъекта. Регулятор управляет отдельным параметром: дыханием, ритмом, равновесием, вниманием, дистанцией. Метарегулятор управляет всей системой действия: собой, другим человеком, пространством, временем, ритмом, направлением, деятельностью и будущим исходом.
Бернштейн: от рефлекса к модели будущего
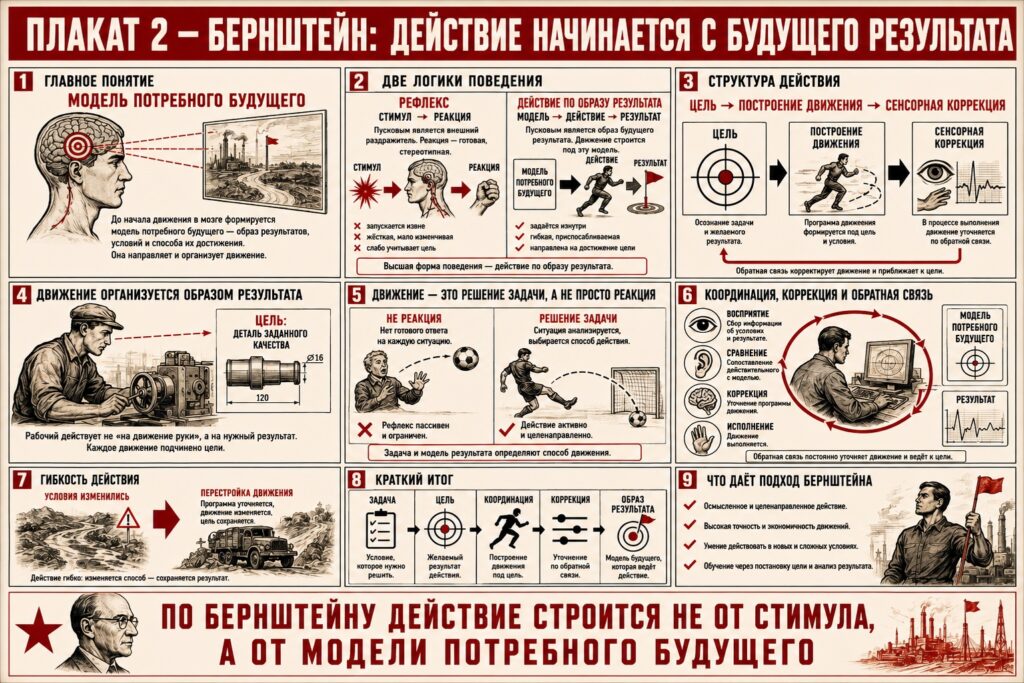
Н. А. Бернштейн совершил один из важнейших поворотов в понимании движения и действия. Он показал, что живой организм не может быть объяснён только как сумма рефлексов. Действие строится не от прошлого стимула, а от будущего результата. Организм действует так, будто уже имеет модель того, что должно получиться.
Эту идею можно выразить формулой:
не стимул → реакция, а модель будущего результата → построение действия → коррекция исполнения.
Бернштейн фактически перевёл физиологию движения из мира механической реакции в мир активного построения. Движение перестало быть ответом тела на раздражение. Оно стало решением задачи. А всякая задача требует будущего: нужно знать, к чему стремится действие, каков его результат, каким образом организм должен перестроить себя, чтобы этот результат стал возможным.
В этом смысле модель будущего — не фантазия и не субъективная мечта. Это рабочая программа действия. Она задаёт направление, регулирует усилие, включает коррекцию, удерживает цель и позволяет организму не просто реагировать, а строить движение.
Для психологии это имеет принципиальное значение. Если действие строится от будущего, то предметом исследования должна стать не только память и не только реакция, а внутренняя конструкция будущего действия. Человек действует потому, что в нём уже возникла определённая модель возможного исхода.
Но у Бернштейна эта линия прежде всего раскрывается через движение, моторику, координацию и физиологию активности. Следующий шаг состоит в том, чтобы показать: модель будущего действует не только внутри тела, но и в системе взаимодействия с другим человеком, пространством и всей ситуацией.
Именно здесь важны Спиридонов и Попов.
Спиридонов и Попов: физическая модель метарегулятора
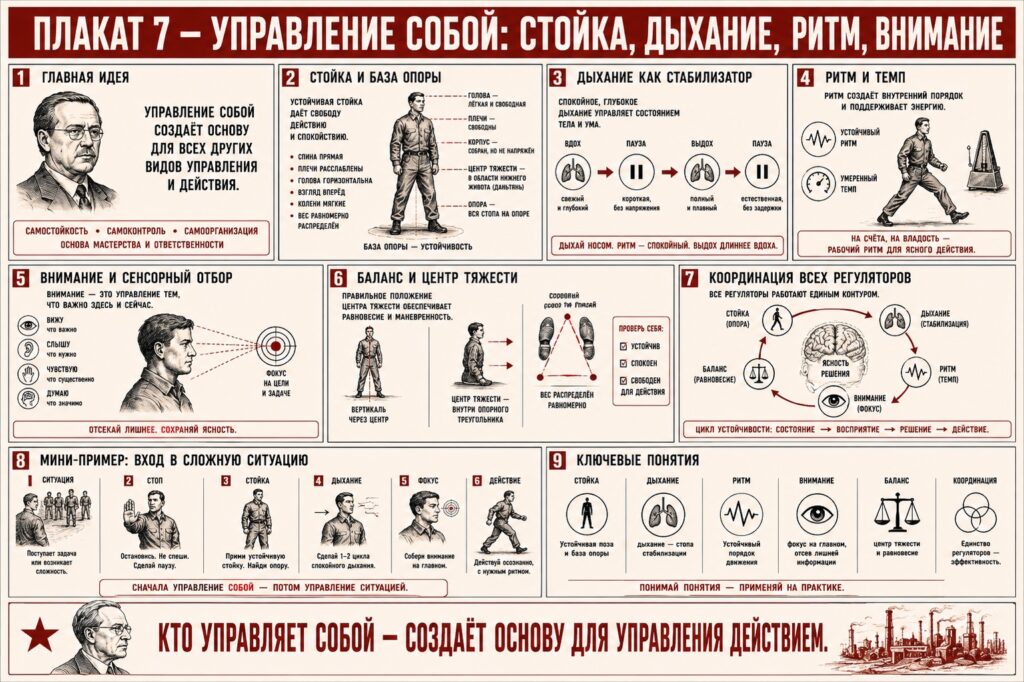
Система Спиридонова САМ важна не как набор приёмов, а как инженерная теория действия. В ней человек рассматривается как система, которой можно управлять через устойчивость, центр тяжести, площадь опоры, инерцию, дыхание, внимание, ритм и пространственное положение.
Это принципиально отличает САМ от примитивного понимания рукопашной подготовки. Речь идёт не о силовом преодолении противника, а об управлении условиями, в которых действие становится эффективным. Сила здесь не является главным фактором. Главным фактором становится регуляция.
В этой логике субъект должен уметь управлять четырьмя уровнями.
- 1. Управление собой
Первый уровень — управление собственной системой. Человек должен управлять равновесием, дыханием, стойкой, вниманием, ритмом, микродвижениями, переносом веса и готовностью к изменению положения.
Это не пассивная устойчивость. Это динамическая устойчивость. Человек устойчив не потому, что неподвижен, а потому что способен перестраиваться. Он не фиксирует тело, а управляет им как живой системой.
С этой точки зрения стойка — это не поза. Стойка — это процесс управления. Центр тяжести — не анатомическая абстракция, а рабочий параметр действия. Дыхание — не фон, а механизм стабилизации. Внимание — не наблюдение, а система распределения управления.
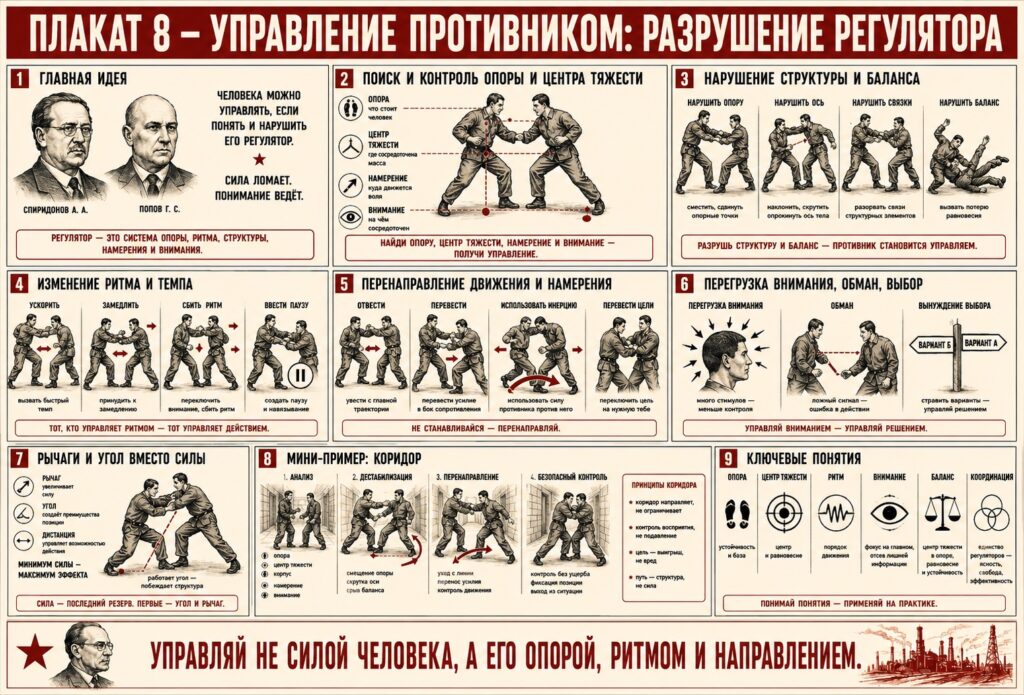
- 2. Управление другим человеком
Второй уровень — управление другим человеком. Противник рассматривается не как «масса», которую нужно победить большей массой, а как система устойчивости, внимания, ритма и намерения.
Если у человека есть регулятор, то этот регулятор можно нарушить. Можно сместить его центр тяжести, перегрузить внимание, изменить ритм, заставить перенести вес, открыть направление, потерять опору, ошибиться в выборе дистанции или войти в неудобную траекторию.
Здесь действие становится управлением чужой системой. Это не обязательно требует грубой силы. Напротив, чем точнее понята структура регулятора противника, тем меньше требуется прямого усилия.
Именно поэтому САМ можно рассматривать как физическую модель метарегуляции: субъект управляет не только своим действием, но и условиями действия другого человека.
- 3. Управление пространством
Третий уровень — управление пространством. В обычном понимании пространство является сценой, на которой разворачивается действие. В прикладной системе Спиридонова пространство становится оружием и регулятором.
Стена, угол, дверь, коридор, лестница, транспорт, толпа, скользкий пол, узкий проход — всё это не просто обстоятельства. Это элементы, которые изменяют возможные траектории. Они ограничивают движение, усиливают или ослабляют опору, создают мёртвые зоны, меняют дистанцию, заставляют человека принимать невыгодные решения.
Тот, кто управляет пространством, управляет выбором другого человека. Он сужает или расширяет поле возможного. Он делает одни траектории вероятными, другие — невозможными.
В этой точке прикладная система действия переходит в навигационную психологию. Человек действует не в пустоте, а в карте ограничений и возможностей.
- 4. Управление деятельностью
Четвёртый уровень — управление самой деятельностью. Это высший уровень. Здесь субъект управляет не отдельным движением и не отдельным воздействием, а ходом всей ситуации.
Он управляет началом, ритмом, паузой, направлением, сменой сценария, входом, выходом, завершением и переходом к следующему действию. В этом смысле деятельность становится системой траекторий. Задача субъекта — не выполнить один приём, а провести ситуацию к нужному исходу.
Именно здесь появляется метарегулятор в полном смысле слова.
Метарегулятор — это механизм, который управляет не движением, а условиями, при которых нужное движение, решение или действие становится наиболее вероятным.
Если Бернштейн показал, что действие строится от модели будущего, то Спиридонов и Попов показали, как это будущее физически навязывается ситуации через управление устойчивостью, пространством, ритмом и регулятором другого человека.
Hippocampal ripples: мозг как машина проигрывания будущих траекторий
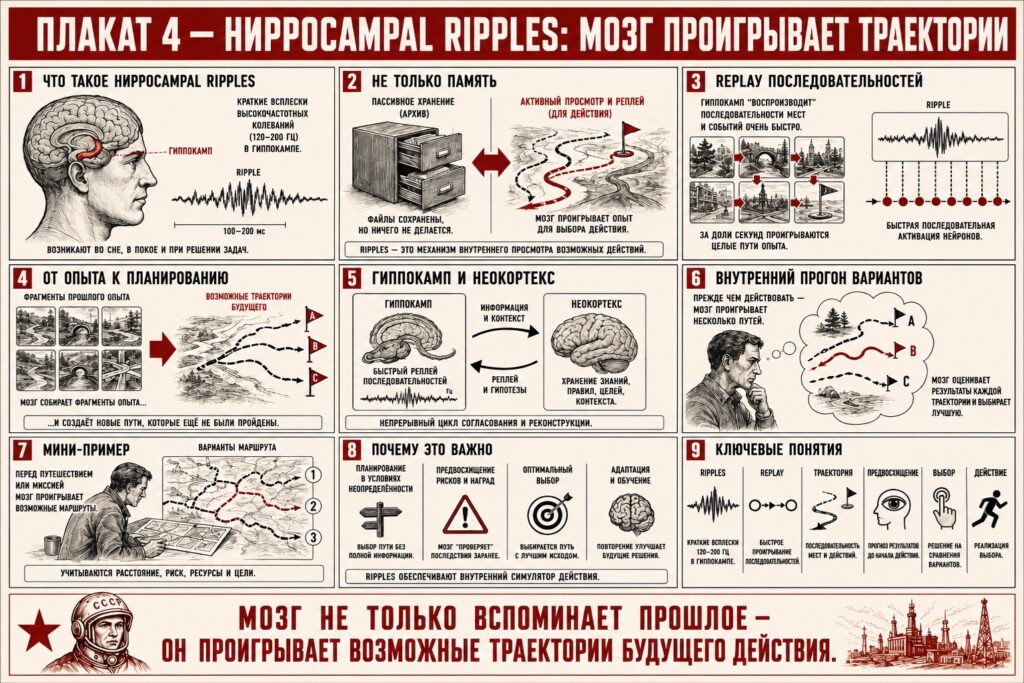
Современная когнитивная нейронаука позволяет сделать следующий шаг. Исследования hippocampal sharp-wave ripples показывают, что гиппокамп нельзя понимать только как механизм памяти. Он участвует в replay, планировании, организации опыта и возможном построении будущих последовательностей.
Работа He et al. показывает, что hippocampal ripples у человека координируют planning sequences и compositional representations в неокортексе. Иными словами, гиппокампальные всплески участвуют не только в воспоминании, но и в организации возможных последовательностей действия.
Это важно потому, что нейронаука начинает подтверждать то, что на уровне теории действия уже было предсказано Бернштейном: организм действует не из прошлого стимула, а из будущей модели результата. Однако современные данные позволяют уточнить: будущее не просто задаётся как цель; оно может внутренне проигрываться как последовательность.
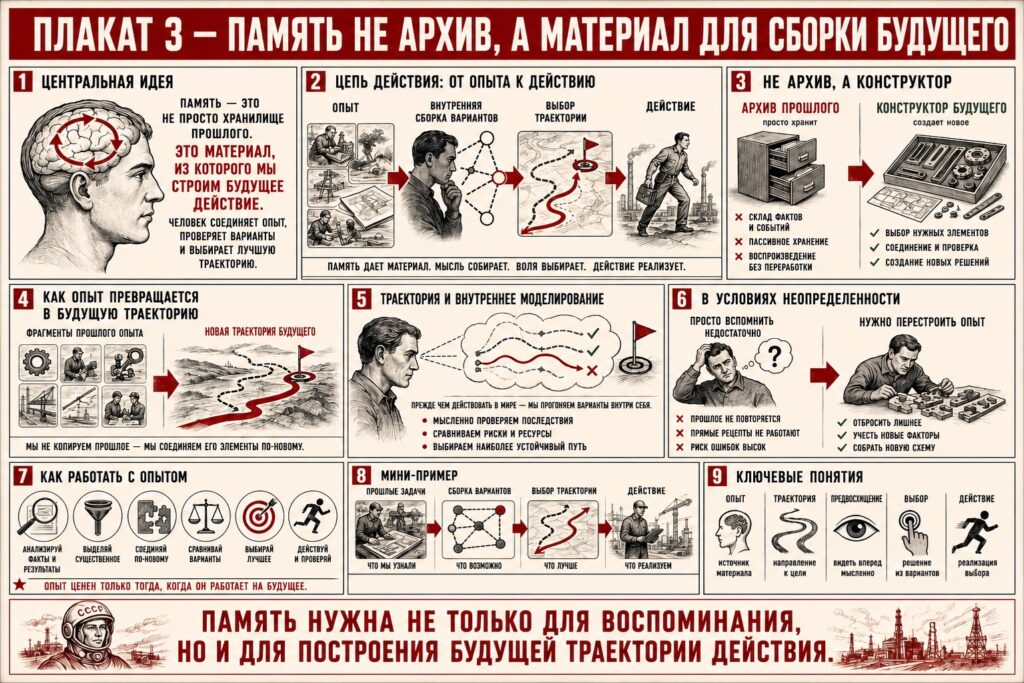
Возникает ключевая формула: память — не архив прошлого, а материал для сборки будущего действия.
Когда мозг проигрывает возможные траектории, он использует прошлый опыт не как готовую инструкцию, а как строительный материал. Из фрагментов опыта собираются возможные маршруты: что произойдёт, если я выберу это направление; где возникнет риск; где появится препятствие; где возможен обход; какой вариант приведёт к нужному результату.
Это не обязательно осознаётся как рассуждение. Внутреннее проигрывание может происходить быстро, сжато, частично, на границе памяти, внимания, предвидения и моторной готовности. Но именно оно делает действие не рефлекторным, а траекторным.
В этой перспективе hippocampal ripples можно рассматривать как один из нейродинамических механизмов внутреннего проигрывания траекторий.
От модели будущего к траектории действия
Бернштейн даёт принцип: действие строится от модели будущего.
Hippocampal ripples дают нейродинамический механизм: мозг способен проигрывать возможные последовательности.
Спиридонов и Попов дают прикладную физическую модель: будущая траектория может быть организована через тело, пространство, ритм, устойчивость и регулятор противника.
Навигационная психология соединяет эти три уровня в единую модель.
В этой модели действие имеет следующую структуру:
опыт → внутренняя сборка возможных траекторий → отбор траектории → допуск к действию → физическая реализация → коррекция по ситуации.
Это принципиально отличается от старой схемы: стимул → реакция.
В новой схеме прошлое не исчезает. Оно сохраняет значение, но меняет функцию. Прошлое больше не является причиной действия в прямом смысле. Оно становится материалом, из которого строится возможное будущее.
Действие начинается не в момент движения. Оно начинается в момент внутреннего проигрывания траектории.
Человек ещё не сделал шаг, но его нервная система уже строит возможные линии движения. Он ещё не вступил в конфликт, но уже оценивает геометрию пространства. Он ещё не произнёс фразу, но уже чувствует, какой ответ изменит ритм взаимодействия. Он ещё не принял решение, но уже сравнивает несколько будущих исходов.
Именно поэтому подготовка человека к неопределённости должна быть направлена не только на реакцию. Реакция всегда запаздывает. Нужно готовить способность к быстрому построению будущей карты действия.
Метарегулятор: механизм выбора и допуска траекторий
Если внутри субъекта может быть построено несколько возможных траекторий, возникает вопрос: какая из них станет действием?
На этом уровне появляется метарегулятор. Метарегулятор выполняет несколько функций.
- Первая функция — сборка траекторий. Субъект должен видеть не один вариант, а поле вариантов. Чем выше уровень подготовки, тем богаче карта возможного.
- Вторая функция — оценка траекторий. Не всякая траектория пригодна. Одни ведут к тупику, другие создают риск, третьи требуют слишком больших затрат, четвёртые дают преимущество.
- Третья функция — подавление лишнего. В неопределённости опасно не только отсутствие варианта, но и избыток вариантов. Метарегулятор должен отсечь шум.
- Четвёртая функция — допуск к реализации. Из множества внутренних возможностей одна траектория должна стать действием.
- Пятая функция — коррекция в процессе. Реальная ситуация никогда полностью не совпадает с внутренней моделью. Поэтому метарегулятор должен не только выбрать траекторию, но и перестраивать её по ходу действия.
- Шестая функция — управление чужим регулятором. В прикладных системах действия субъект управляет не только собой. Он воздействует на внимание, ритм, устойчивость и решение другого человека.
- Седьмая функция — управление средой. Пространство, время, дистанция и предметная обстановка превращаются в элементы действия.
Таким образом, метарегулятор — это механизм управления не отдельным движением, а всей архитектурой действия.
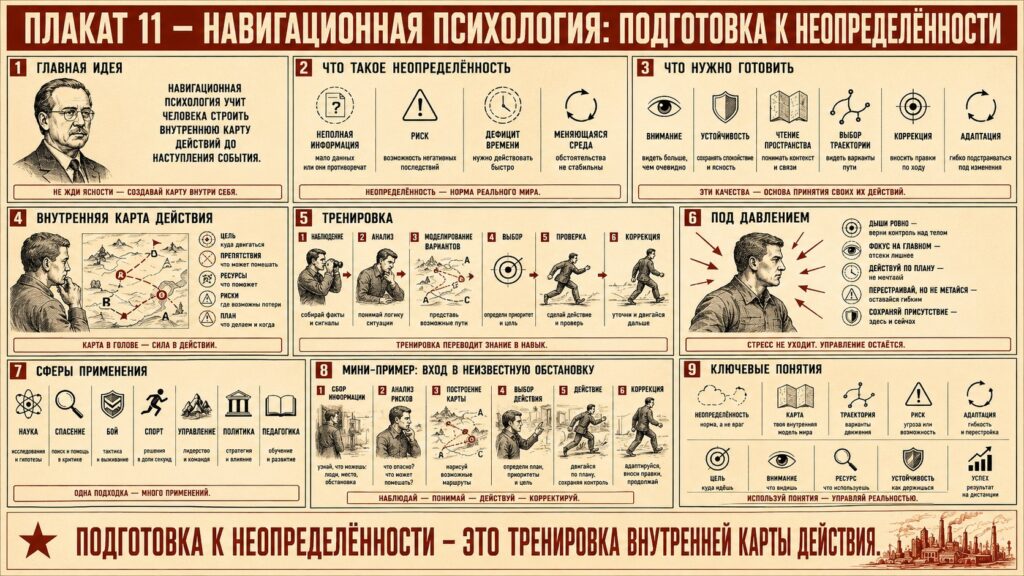
Навигационная психология как наука будущей траектории
Навигационная психология должна изучать не только то, как человек запоминает, воспринимает или реагирует. Её предмет — как человек строит внутреннюю карту действия в неопределённости.
Главный вопрос навигационной психологии:
как субъект выбирает траекторию там, где будущее ещё не определено?
В этом вопросе соединяются память, внимание, прогнозирование, моторика, пространство, риск, решение и деятельность.
Навигационная психология рассматривает человека как систему, которая должна:
- видеть поле возможного;
- выделять значимые признаки;
- строить траектории;
- сравнивать их;
- удерживать цель;
- подавлять ложные варианты;
- использовать пространство;
- управлять своим состоянием;
- влиять на регулятор другого человека;
- переходить от внутренней модели к действию.
В этом смысле навигационная психология продолжает Бернштейна, но выходит за пределы моторики. Она продолжает Спиридонова и Попова, но выходит за пределы рукопашной системы. Она использует данные нейронауки, но не сводит человека к мозговым процессам.
Её предмет — человек как система построения будущего действия.
Подготовка человека к неопределённости
Если принять предложенную модель, меняется педагогика подготовки.
Нельзя готовить человека только по принципу повторения готового движения. Готовое движение работает в известной ситуации. Но неопределённость разрушает шаблон.
Нельзя готовить человека только на реакцию. Реакция всегда вторична. Она приходит после события. В сложной ситуации нужно действовать не после события, а внутри его становления.
Нельзя готовить человека только через память. Память важна, но сама по себе она не решает задачу. Она должна быть превращена в материал для построения будущей траектории.
- Подготовка должна включать:
- тренировку внутреннего проигрывания вариантов;
- тренировку видения пространства;
- тренировку управления устойчивостью;
- тренировку переключения ритма;
- тренировку работы с вниманием;
- тренировку подавления ложных траекторий;
- тренировку выбора под давлением;
- тренировку восстановления регулятора после сбоя;
- тренировку управления чужим регулятором;
- тренировку выхода из нестабильной среды.
В этом смысле САМ Спиридонова становится не только исторической системой прикладной подготовки, но и моделью педагогики неопределённости. Он показывает, что человек должен быть обучен управлять не только техникой, но и условиями действия.
Обсуждение: три уровня будущего
В предлагаемой модели можно выделить три уровня будущего.
1. Физиологическое будущее
Это уровень Бернштейна. Организм строит движение от модели потребного результата. Будущее задаёт структуру настоящего движения.
2. Нейродинамическое будущее
Это уровень hippocampal ripples. Мозг способен проигрывать возможные последовательности, используя прошлый опыт как материал для планирования.
3. Прикладное физическое будущее
Это уровень Спиридонова и Попова. Субъект строит такую физическую и пространственную ситуацию, в которой нужная траектория становится более вероятной, а нежелательная траектория противника — менее возможной. Эти три уровня не противоречат друг другу. Они описывают разные стороны одного процесса.
Бернштейн объясняет, почему действие не может быть сведено к рефлексу. Hippocampal ripples объясняют, как мозг может проигрывать возможные траектории. Спиридонов и Попов показывают, как траектории физически организуются в реальной ситуации.
Навигационная психология превращает это в общую теорию действия.
Заключение
Человеческое действие нельзя объяснить только прошлым. Стимул, память, привычка и навык имеют значение, но они не исчерпывают природу действия. Человек действует в направлении будущего, которое ещё не наступило, но уже организует его поведение. Бернштейн показал, что действие строится от модели будущего. Спиридонов и Попов показали, что будущий исход можно физически организовать через управление устойчивостью, телом, пространством, ритмом и регулятором другого человека. Современные исследования hippocampal ripples показывают, что мозг способен проигрывать возможные последовательности, используя прошлый опыт как материал для планирования.
Из этого следует главный вывод: действие есть реализация одной из предварительно проигранных траекторий будущего.
Метарегулятор — это механизм, который выбирает, допускает, подавляет и перестраивает эти траектории.
Поэтому подготовка человека к неопределённости должна быть направлена не только на память, реакцию и навык, а на способность строить внутреннюю карту действия, управлять собой, другим человеком, пространством и самой деятельностью.
Короткая формула всей статьи:
- от рефлекса — к модели будущего;
- от модели будущего — к проигрыванию траекторий;
- от траекторий — к метарегулятору действия.





Литература
Bernstein, N. A. (2014). Nikolai Bernstein: From reflex to the model of the future. LIT Verlag.
He, L., Wang, X., Zhang, J., Xiao, Z., Hu, X., Schwartenbeck, P., Bakermans, J., Behrens, T., & Liu, Y. (2026). Human hippocampal ripples coordinate planning sequences and compositional representations in neocortex. Nature Neuroscience. Advance online publication.
Liu, A. A., et al. (2022). A consensus statement on detection of hippocampal sharp-wave ripples and differentiation from other fast oscillations. Nature Communications, 13, 6000.
Автор: Мальцев О. В. (рабочая монография). Система Спиридонова САМ